2026/03/11 4:22
Python:最適化の階段 (タイトルのみ)
RSS: https://news.ycombinator.com/rss
要約▶
Japanese Translation:
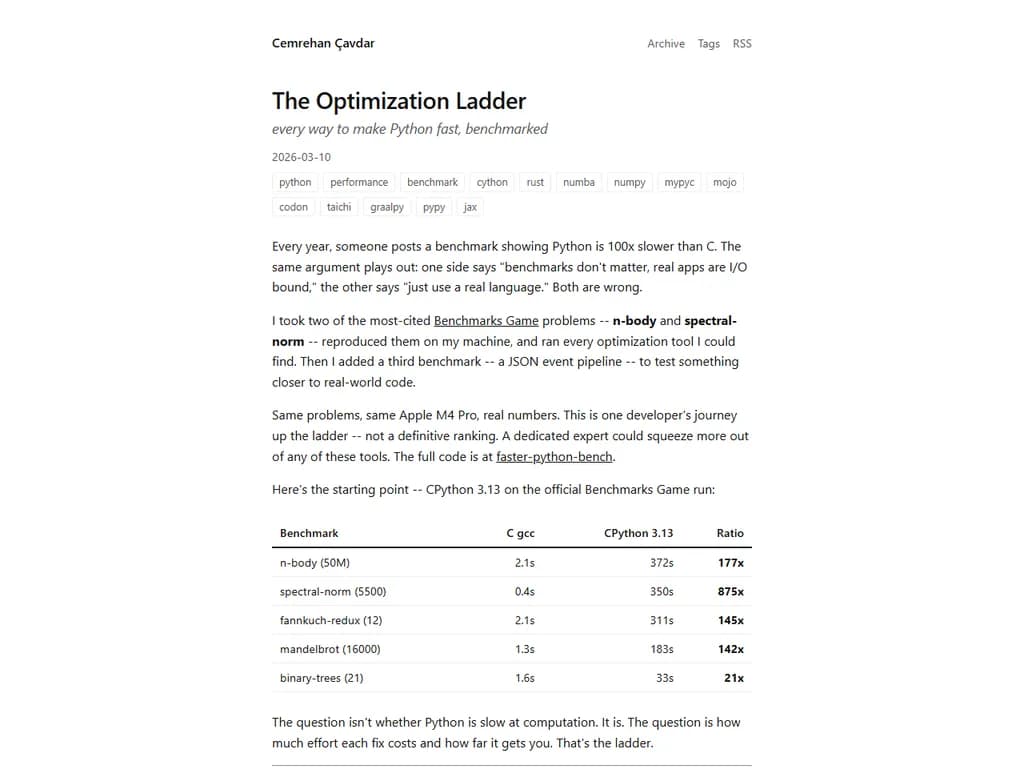
Python の純粋な計算速度は、典型的なベンチマーク(n‑body 177×、spectral‑norm 875×)で Apple M4 Pro 上において C に比べて 100–875 倍遅く動作します。
この低下は Python の動的ディスパッチ、整数あたり約 28 バイトのオーバーヘッド、および GIL(グローバルインタプリタロック)の参照カウント処理に起因し、GIL 自体は単一スレッドコードを悪化させません。
最近の CPython リリースでは小規模な改善が見られます:
3.10→3.11 で適応型特殊化による約 1.4 倍の速度向上。
3.13 は軽量 JIT を追加しますが、まだメリットは確認されていません。
free‑threaded モード(3.14t)は実際に単一スレッドプログラムを遅くします。
ギャップを埋めるための選択肢はいくつかあります:
-
ランタイム代替案
- PyPy / GraalPy:コード変更なしで 6–66 倍高速化。ただし JVM/JIT のウォームアップにより起動が遅く、エコシステムサポートは限定的。
- Codon、Mojo nightly、Taichi:26–198 倍の利得がありますが、完全なリライトや古い CPython バージョンが必要です。
-
コンパイル済み拡張
- mypy‑c(型付き Python → C):2.4–14 倍の速度向上。型アノテーションが必要で、機能は限定的に最適化されます。
- Rust/PyO3:113–154 倍、特にデータパイプライン全体をネイティブで処理する場合(例:JSON パース)。
- Cython:開発者が C 構文を採用し、型アノテーションを書き、** 演算子や cdivision の欠如、事前計算インデックスなどの落とし穴を回避すると 99–124 倍。
-
加速ライブラリ
- NumPy:BLAS を通じてベクトル化可能な行列-ベクトルワークロードで最大 520 倍。順序性や小規模配列には効果がありません。
- JAX JIT:lax.fori_loop と lax.cond を用いて再構築した配列プログラムで最大 1 633 倍。関数型コードが必要です。
- Numba @njit:NumPy 配列上でコンパイルすると 56–135 倍。一般的な Python オブジェクトや文字列には苦戦します。
実際のワークロード(約 100 k JSON イベント)では、最も達成可能な速度向上は、json.loads() による Python 辞書生成を回避したネイティブ Rust または Cython パーサーを使用することで約 6.3 倍です。適切なツールを選択すると、データ集約型、科学的、およびパフォーマンスクリティカルなアプリケーションの実行時間を劇的に短縮できます。
Text to translate
(incorporating all key points):**
Python’s pure‑compute speed lags behind C by 100–875× on typical benchmarks (n‑body 177×, spectral‑norm 875×) run on an Apple M4 Pro. The slowdown is due to Python’s dynamic dispatch, ~28 bytes per int overhead, and GIL reference‑counting; the GIL itself does not hurt single‑threaded code. Recent CPython releases offer modest gains: 3.10→3.11 gives ≈1.4× speedup via adaptive specialization; 3.13 adds a lightweight JIT but shows no benefit yet; free‑threaded mode (3.14t) actually slows single‑threaded programs. To close the gap, several options exist: * Runtime alternatives * PyPy / GraalPy: 6–66× faster with zero code changes; startup slower due to JVM/JIT warm‑up and limited ecosystem support. * Codon, Mojo nightly, Taichi: 26–198× gains but require full rewrites or older CPython versions. * Compiled extensions * mypy‑c (typed Python → C): 2.4–14× speedups; needs type annotations and only optimises a subset of features. * Rust/PyO3: 113–154×, especially when the entire data pipeline is handled natively (e.g., JSON parsing). * Cython: 99–124× when developers adopt C semantics, write type annotations, and avoid pitfalls like ** operator, missing cdivision, or pre‑computed indices. * Accelerated libraries * NumPy: up to 520× on vectorisable matrix‑vector workloads via BLAS; ineffective for sequential or small arrays. * JAX JIT: up to 1 633× on array programs rewritten with lax.fori_loop and lax.cond (requires functional‑style code). * Numba @njit: 56–135× when compiled over NumPy arrays; struggles with general Python objects or strings. In realistic workloads (≈100 k JSON events), the best achievable speedup is ~6.3× by using a native Rust or Cython parser that avoids creating Python dictionaries via json.loads(). Choosing the right tool can dramatically reduce runtimes in data‑intensive, scientific, and performance‑critical applications.
本文
主要ポイント
Python が 遅い のは、設計上で高速化よりも動的挙動を優先しているからです。
下の「階段」では、各最適化手順に必要な労力と実際に期待できる速度向上を示しています。
| 階 | ツール/テクニック | 労力 | 典型的な速度向上 | 備考 |
|---|---|---|---|---|
| 0 | CPython のアップグレード (3.10 → 3.11/3.13) | なし – 新しいイメージを使うだけ | n‑body で約1.4×、spectral‑norm で約1.05× | より高速な CPython は適応型バイトコード特殊化を追加 |
| 1 | 別のランタイム (PyPy, GraalPy) | インタプリタを切り替える | 6–66× | PyPy:トレーシング JIT、GraalPy:Truffle/JVM JIT |
| 2 | Mypyc | 型注釈を追加 | 2.4–14× | タイプ付き Python を C 拡張にコンパイル |
| 3 | NumPy | コードをベクトル化 | 520× (spectral‑norm) | 重い計算を BLAS に委譲、配列中心のアルゴリズムが必要 |
| 3a | JAX JIT | ループを | 12–1 633× | XLA のグラフ全体コンパイル、線形代数に最適 |
| 4 | Numba ( | 数値ループをデコレートし NumPy 配列を使用 | 56–135× | 細かい数値ループで効果的 |
| 5 | Cython | Python コードに C 型をアノテーション | 99–124× | C の知識が必要、隠れた「地雷」に注意 |
| 6 | 新世代コンパイラ (Codon, Mojo, Taichi) | 新しい言語/ランタイムを採用 | 26–198× | 開発体験は粗く、エコシステムは限定的 |
| 7 | Rust via PyO3 | 重要な部分を Rust で書き直す | 113–154× | データフロー全体を所有できると最適 |
ベンチマーク(Apple M4 Pro)
n‑body (500 k イテレーション)
| アプローチ | 時間 | 速度向上 |
|---|---|---|
| CPython 3.10 | 1 663 ms | – |
| CPython 3.14 | 1 242 ms | 1.0× |
| Mypyc | 518 ms | 2.4× |
| PyPy | 98 ms | 13× |
| GraalPy | 211 ms | 5.9× |
| Codon | 47 ms | 26× |
| Taichi | 16 ms | 78× |
| Mojo | 16 ms | 78× |
| Numba @njit | 22 ms | 56× |
| Cython | 10 ms | 124× |
| Rust (PyO3) | 11 ms | 113× |
Spectral‑norm (N=2000)
| アプローチ | 時間 | 速度向上 |
|---|---|---|
| CPython 3.14 | 14 046 ms | – |
| Mypyc | 990 ms | 14× |
| PyPy | 1 065 ms | 13× |
| GraalPy | 212 ms | 66× |
| Codon | 99 ms | 142× |
| Taichi | 71 ms | 198× |
| Mojo | 118 ms | 119× |
| Numba @njit | 104 ms | 135× |
| NumPy | 27 ms | 520× |
| JAX JIT | 8.6 ms | 1 633× |
| Cython | 142 ms | 99× |
| Rust (PyO3) | 91 ms | 154× |
JSON イベントパイプライン (100 k イベント)
| アプローチ | 時間 | 速度向上 |
|---|---|---|
CPython 3.14 ( | 105 ms | – |
| Mypyc | 77 ms | 1.4× |
| Cython | 67 ms | 1.6× |
| Rust (serde, raw bytes) | 21 ms | 5× |
Cython ( | 17 ms | 6.3× |
重要な洞察 – 本質的なボトルネックは
でした。json.loads()
データをネイティブコード(Cython または Rust)でパースすると、純粋 Python に比べ約5–6倍の高速化が実現しました。
上げるべきか止めるべきか
| ツール | 労力 | 典型的な利得 | いつ有効か |
|---|---|---|---|
| CPython のアップグレード | なし | 1.4× | すべてのプロジェクトで最初に行うべき |
| Mypyc | 型ヒントを追加 | 2–14× | タイプ付きコードベースがある場合 |
| PyPy / GraalPy | インタプリタ切替 | 6–66× | 純 Python、C 拡張なしのプロジェクト |
| NumPy | 数学をベクトル化 | 520× | 線形代数や要素ごとの演算に最適 |
| JAX | 関数型リライト | 最大1 633× | XLA に収まる大規模配列ワークロード |
| Numba | ループデコレート + NumPy 配列 | 56–135× | 細かい数値ループに適用 |
| Cython | C アノテーションとデバッグ | 99–124× | C スタイルコードを書ける場合 |
| Rust (PyO3) | Rust を学び重要部分を再実装 | 113–154× | データフロー全体を所有したい場合 |
多くの Python ワークロードは I/O バウンドであったり、ハイレベルライブラリに依存しています。
そのようなケースでは階段はほとんど効果がありません。
実際のホットスポットを特定するためにやcProfileを使ってプロファイルを取ることが不可欠です。line_profiler
補足メモ
- GIL:単一スレッドベンチマークでは影響なし。除去すると参照カウントのオーバーヘッドで逆に遅くなる場合があります。
- CPython 3.13 JIT:今回のベンチマークでは改善が見られませんでした。後続リリース(≈ 8 % の向上)で効果が出るようです。
- Nuitka, Pythran, SPy, CinderX:本稿では触れていませんが、将来のプロジェクトで注目すべき技術です。
TL;DR
- 最新 CPython にアップグレード – 無料で 1.4× の向上。
- 型注釈済みなら Mypyc を実行 – 数分の作業で 10×以上の加速。
- 純粋な数値ループには Numba または Cython を試す。
- 大規模配列ワークロードなら NumPy(または JAX が関数型リライト可能なら)を選ぶ。
- データ解析や所有権がボトルネックなら Rust か Cython のネイティブパーサーに切り替える。
ハッキング、楽しんでください!